OpenSource IV Drip Flow Measurement Device



Copyright - OpenIT
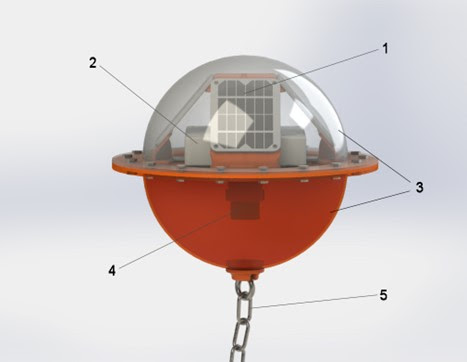
OpenLevo is
a smart buoy that utilises the latest advancements in the MEMS-based
sensors and IMU-Fusion algorithms to measure directional waves. The device can
capture significant wave height, wave period and wave direction precisely,
without any maintenance, sensing the 3D motion.
Using power-efficient sensors, solar energy
and satellite coverage, OpenLevo can be deployed in the sea or
lakes and report meaningful wave characteristics around the world 24/7. Wave
sensing buoys can improve sea forecasting models, have an important role in
research programs and act as a valuable source of information for emergency
situations.


PointAir is a WearOS 3 app that brings home automation to your hand. You can just point to a device and send a command to it. It works by using BLE advertisements of the hand's pointing vector through one BLE anchor device per room. Smart devices are configured per room and pointing vector. The anchors detect the room by rssi and the watch advertises the pointing vector.
