Project Maco redesign tries to create a 2DOF force/haptic feedback analog stick for gamepads.
Using rotary voice coil motors (like HDD positioning motors) we accomplish both force and haptic feedback to the thumbs of the user, plus the linear connection between Force and Current from Lorrentz law for constant field density (F=BnLI). Final targets are:
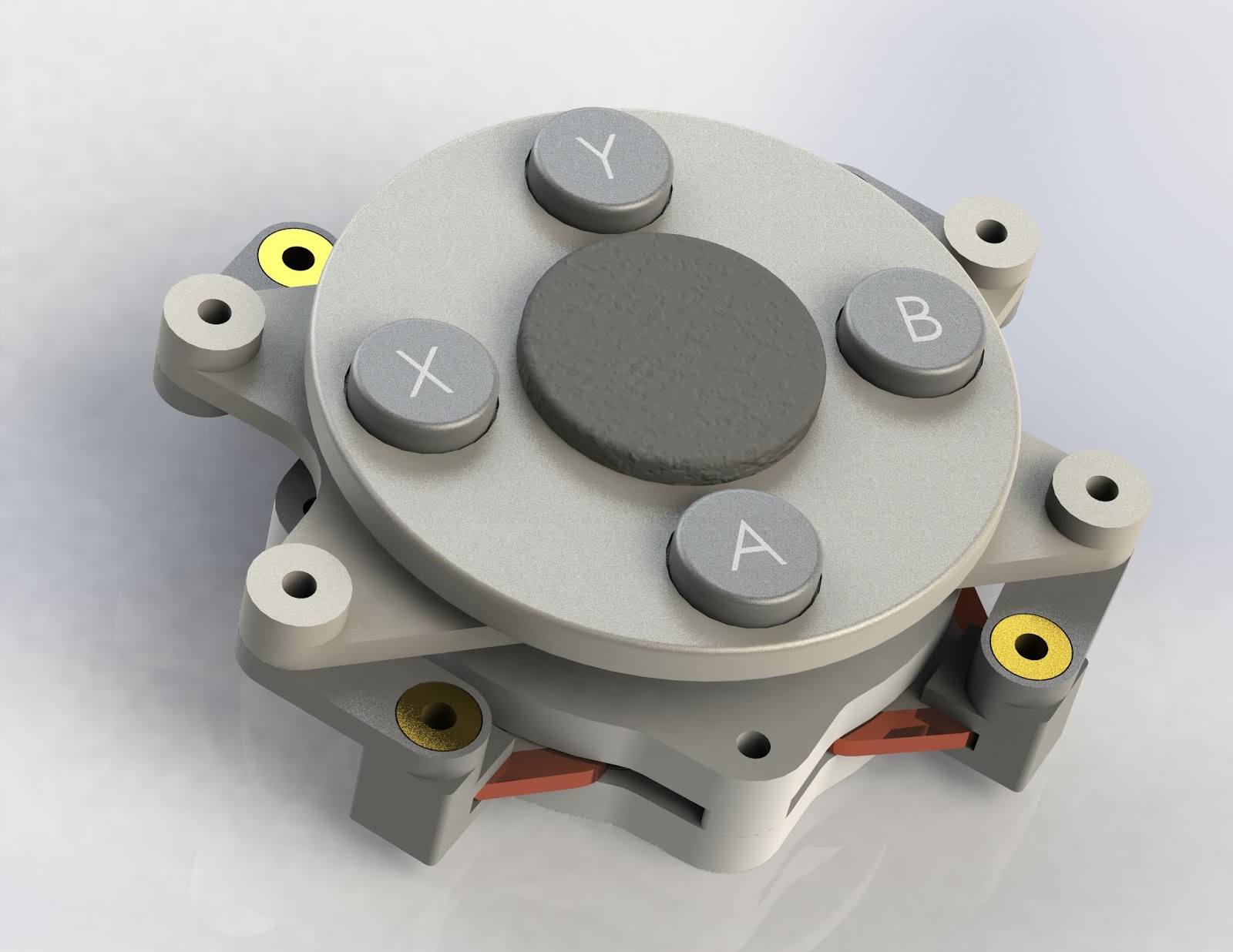
- 3D print the whole design (FDM the bigger parts and maybe SLA the smaller ones) and use consumer fittings (bearings, bushes) wherever needed in order to avoid vibration damping and backlash.
- Drive the VCMs with the appropriate electronics. Usually, for ERM or LRA actuators, one can use haptic driver ICs like DRV2603 from Texas Instruments, but we also need to drive the VCMs like linear force motors so this scenario is not matching. Also, the available IC drivers for haptic provide very simple functions for click like or vibration like events, no haptic texture or dynamic forms of feedback are available. So, we will use an H-Bridge IC and run it like a D-Class amplifier using low-pass 1KHz filters to cut most of the audible and noisy harmonics from the motor, most probably a DRV8835 which has high freq PWM signalling. The H-Bridge will be driven by a uC, probably a 328P if 16MHz are efficient enough, using PDM signalling to accomplish as smooth current transitions as possible.
- Research and develop haptic libraries and force feeback scenarios, like walking a game character on snow, grass, or sand and having "force 3-D valleys", where in xy is the thumbstick position and in z is the needed force. With the latest example something like a cars gearbox can be simulated where the user switches gears with the right analog stick which feels exactly like a car's stick transition pattern.
- Develop simple 2-D or 3-D games where users can play using the Maco and obtain feedback regarding the UX in different scenarios.